

Цифровые импульсные процессоры. Теория работы
Цифровые импульсные процессоры широко используются в ядерном приборостроении и являются основой большинства систем, продаваемых Amptek. Цифровой импульсный процессор выполняет те же функции, что и аналоговый усилитель-формирователь, но имеет эффективные преимущества в производительности, которые привели к его широкому внедрению там, где одновременно необходимы самый низкий уровень шума и самая высокая скорость счёта. Хотя функции цифрового импульсного процессора такие же как у аналогового формирователя, реализация различается, и некоторые из понятий и терминология также отличаются. Цель данного руководства по применению – сравнить аналоговый и цифровой формирователь, помочь пользователям в понимании цифровых процессоров и объяснить их преимущества и недостатки.
Упрощённые схемы
На рис. 1 и на рис. 2, соответственно показаны упрощённые схемы аналогового и цифрового усилителя-формирователя. Оба имеют тот же самый детектор и зарядочувствительные предусилительные цепи. В обоих случаях предусилитель вырабатывает выходной сигнал, который состоит из небольших импульсов (шагов), амплитудой в милливольт. В обоих случаях, импульсы предусилителя дифференцированы таким образом, чтобы шаг напряжения можно было измерить. Интегратор (иначе называемый фильтр низких частот) улучшает соотношение сигнал/шум. В обоих случаях, выходные импульсы оцифровываются, и гистограммы амплитуды импульсов хранятся в памяти. Эти ключевые элементы являются одинаковыми в обеих системах.
Рисунок 1. Схема простого аналогового формирователя импульсов (с CR-RC2 формирователем)
")
Рисунок 2. Упрощённая схема «идеального» цифрового импульсного процессора

Прежде чем перейти к более детальному изучению работы цифрового импульсного процессора следует ознакомиться с основными терминами, которые используются в ядерной электронике, на рисунке 3 представлена иллюстрация однополярного импульса.
Рисунок 3. Иллюстрация типичной формы однополярного импульса

Продолжительность импульса - время, в течение которого амплитуда импульса не равна нулю. Из-за трудности определения точного значения "нулевой" амплитуды, оно обычно определяется как ПШПВ (полная ширина на половине высоты), время в течение, которого амплитуда импульса больше или равна половине высоты пика.
Высота пика - высота импульса, измеряемая от пика до базовой линии.
Время пика - время, необходимое для формирования импульса от базовой линии до пика, связано с постоянной времени усилителя формирователя.
Время пика - время, необходимое для формирования импульса от базовой линии до пика, связано с постоянной времени усилителя формирователя.
Базовая линия – значение напряжения в отсутствие импульса от зарегистрированного события. В ядерной электронике, высота импульса измеряется по отношению к базовой линии, которая не обязательно должна быть равной нулю.
Стабилизатор базовой линии (base-line stabilizer – BLS) его задача состоит в фиксации точки отсчета амплитуды импульса вне зависимости от температурных и временных дрейфов электронных компонентов и эффектов высокой скорости счета (ди-намические смещения на разделительных емкостях и микро-разогревы входных каскадов операционных усилителей).
Перейдем к рассмотрению функциональной схемы импульсного формирователя. Аналоговая система, показанная на рис. 1 уступает импульсному формирователю, показанному на рис. 5 (слева). Дифференциатор – это RC фильтр высоких частот. Фронт проходит через предусилитель, а затем напряжение экспоненциально затухает обратно к исходному (базовой линии) с постоянной времени Tdiff. Интегратор – это фильтр низких частот со временем отклика Tint. Существует много видов усилителей-формирователей (полу-Гауссовый, псевдо-Гауссовый, квази-треугольный и т. д.), которые используют различные фильтры низких частот, формы импульсов от разных усилителей- формирователей представлены на рисунке 4.
Рисунок 4. Иллюстрация форм импульса, полученных с различных усилителей- формоватилей. Каждый из них имеет постоянную константу времени формирования, равную в 1 мкс, но интеграторы – фильтры низких частот, используют различные функции передачи

Общие свойства:
RC-CR: Очень прост в реализации, но, как правило, имеет низкую производительность, то есть шум, мертвое время, и стабильность.
- Биполярный: Просадка импульса позволяет добиться хорошей стабильности базовой линии, прост в реализации, но имеет длительную продолжительность импульса и как следствие большое значение мертвого времени и плохие шумовые характеристики
- Полу-Гауссовой и псевдо-Гауссовой: Реализованы с использованием активных фильтров (сложные пары полюсов). При использовании с активной генерацией базовой линии, они обеспечивают хорошую производительность, используя аналоговые компоненты.
- Квази-Треугольный: Также реализован с использованием активных фильтров в аналоговых компонентах. Это очень близок к "идеальной" передаточной функции, для достижения оптимальной производительности, но является относительно сложным.
- Трапециевидный: Реализован с использованием цифровой обработки. Также очень близок к идеалу, имеет конечную импульсную характеристику и повышение производительности при высоких скоростях счета.
Более сложные усилители-формирователи, использующие смешанную комплексную полюсную пару, имеют быстрый возврат к базовой линии с более симметричной формой. Обычно форма импульса аппроксимируется по Гауссу с характеристикой формирующего времени t. Время пика приблизительно 2.2t, с сопоставимой продолжительностью в половину максимального напряжения, но хвост сохраняется в течение более длительного времени. Генератор базовой линии (BLR) воспроизводит базовую линию, от которой измеряется каждый пик. Без BLR, переменный ток с дифференциатора будет падать на высоких скоростях счета, так как выход постоянного тока должен быть равен нулю. Аналоговый пик детектируется и цепь захватывает амплитуду пика, которая затем оцифровывается. Этот единичный цифровой образец представляет собой импульс, поэтому АЦП должен быть линейным, но не обязательно очень быстрым, так как он оцифровывает только один образец импульса.
В «идеальной» цифровой системе, показанной на рис. 2 сигнал предусилителя, оцифровывается напрямую, используя быстрый АЦП. Это дифференцированное использование дискретной дифференцирующей цепи. Сигнал посылается низкочастотному фильтру, который интегрирует выход дифференциатора. Два блока отмеченные «процесс» представляют алгоритмы, которые применяются ко входным сигналам и которые отличают один цифровой процессор от другого. Самый распространенный низкочастотный фильтр, дает треугольный сигнал на выходе.
Трапецеидальные импульсы также легко синтезируются, наряду с более сложными формами, такими как «шип». Значения уже оцифрованы, поэтому зарегистрированный цифровой пик отправляется в гистограмму памяти. Память гистограммы работает как в традиционном многоканальном амплитудном анализаторе. Когда возникает импульс с конкретным пиковым значением, счетчик в соответствующей ячейке памяти увеличивается. В результате получается, массив, содержащий, в каждой ячейке, число событий с соответствующим значением импульса. Это энергетический спектр и является основным выходом процессора. Выход интегратора также может передаваться на ЦАП, поэтому пользователь может просматривать импульсы на осциллографе, но система не должна генерировать аналоговую форму импульса. Импульсный формирователь показан на рис. 5 (справа).
Трапецеидальные импульсы также легко синтезируются, наряду с более сложными формами, такими как «шип». Значения уже оцифрованы, поэтому зарегистрированный цифровой пик отправляется в гистограмму памяти. Память гистограммы работает как в традиционном многоканальном амплитудном анализаторе. Когда возникает импульс с конкретным пиковым значением, счетчик в соответствующей ячейке памяти увеличивается. В результате получается, массив, содержащий, в каждой ячейке, число событий с соответствующим значением импульса. Это энергетический спектр и является основным выходом процессора. Выход интегратора также может передаваться на ЦАП, поэтому пользователь может просматривать импульсы на осциллографе, но система не должна генерировать аналоговую форму импульса. Импульсный формирователь показан на рис. 5 (справа).
Рисунок. 5 Слева формы импульсов в аналоговом формирователе импульсов. Они соответствуют квазитреугольному формирователю, использующему сложные полюса, которые наиболее близки к треугольнику. Справа: форма импульсов в цифровом импульсном процессоре с треугольными и трапецеидальными формами.

Реальный цифровой процессор
Реальный цифровой процессор имеет несколько ключевых отличий от «идеального». Более того, из-за динамического диапазона не практично напрямую оцифровывать выход предусилителя. Каждый предусилитель на выходе имеет шаг, амплитудой в милливольт, который движется по базовой линии, которая может быть величиной в несколько вольт и меняться со временем. Шаг необходимо оцифровать от 10 до 14 бит и просто не существует AЦП, который бы сочетал в себе точность динамического диапазона выхода предусилителя и необходимую скорость. Таким образом, выход предусилителя передается к аналоговому фильтру предварительной очистки, что позволяет точно оцифровывать шаг. Используются несколько различных подходов для исключения базовой линии и усиления шага до оцифровки. Кроме того, существуют различные реализации дифференциатора, из низкочастотного фильтра или интегратор, и логики обнаружение пика.
Вывод: Преимущества и недостатки цифрового фильтрования
Цифровой процессор имеет несколько ключевых преимуществ, приведенных здесь и объяснённых ниже. Цифровой импульсный процессор имеет лучшее исполнение (одновременно низкий шум и высокую скорость счёта) большую гибкость для настройки к конкретной области применения, лучшую стабильность и воспроизводимость.
- Исследователи давно получили идеальные фильтры для использования в ядерной электронике, которые дают лучшее отношение сигнал – шум при заданной скорости счёта. Идеальная передаточная функция не может быть легко произведена в практической схеме операционного усилителя, но цифровой процессор наиболее близко подходит к идеальному.
- Не существует мертвого времени, связанного с детектированием и оцифровкой сигнала, поэтому цифровой процессор имеет более высокую пропускную способность, чем аналоговая система. Кроме того, поскольку он имеет конечную импульсную характеристику, наложения и другие эффекты перекрытия импульсов уменьшаются. Преимущество производительности цифрового процессора особенно заметно при высокой скорости счета.
- В аналоговом импульсном процессоре, большинство параметров определяется резисторами и конденсаторами. Это непрактично иметь много различных параметров конфигурации в аналоговой системе. В цифровой системе можно иметь гораздо больше формирующих временных констант, параметров BLR, и т.д., поэтому пользователь может легко адаптировать систему к потребностям задачи, повышая эффективность работы.
- Поскольку аналоговая система построена на резисторах и конденсаторах, её стабильность ограничена постоянством этих компонентов, а воспроизводимость -их погрешностями. В цифровой системе, стабильность и воспроизводимость намного лучше потому, что они задаются от несколько очень точных источников, например, для настройки времени от кварцевого генератора.
Существуют и недостатки у цифрового процессора. Во-первых, он имеет тенденцию рассеивать большую мощность: АЦП с подходящей скоростью и точностью рассеивает больше мощности, чем многие аналоговые разработки. Во-вторых, конструкция более сложная, чем аналоговый усилитель-формирователь.
Преимущества цифровой фильтрации
Конечная импульсная характеристика:
В аналоговом формирователе, входящий импульс ведёт к появлению экспоненциального хвоста от дифференциатора, которому требуется бесконечная продолжительность времени, чтобы вернуться к нулевому значению. Это называется «бесконечная импульсная характеристика» или IIR. Выход незначителен после конечного времени, но он отличен от нуля в течение долгого времени, обычно во много раз превышающего номинальную «ширину» импульса. Последующие импульсы «садятся» на хвост более ранних импульсов. Так как на выходе высокочастотного фильтра постоянный ток, то базовая линия сдвигается со скоростью счета: в большом промежутке среднее значение импульса важно и зависит от длительности, но имеет малую амплитуду хвоста. Поэтому происходит наложение пиков, и основная линия смещает результат IIR аналогового дифференциатора. Наложением пиков считается событие, в котором два и более импульсов перекрываются во времени (рис. 6).
Рисунок 6. Иллюстрация наложения импульсов

Этот график показывает, пять инцидентов, которые возникают в случайных временных интервалах, так как ядерный распад является случайным процессом. Отдельные импульсы выделены черными линиями, в то время как синие точки представляют собой сумму, наложившихся импульсов, которая была измерена. Первый импульс, слева, выделен во времени и его амплитуда измерена на правильной высоте. Следующие два частично перекрываться, с седловиной между пиками. Два импульсы будут записаны, и первый будет иметь правильную высоту импульса, но амплитуда второго импульса будет измерена неправильно. Перекрытие двух импульсов, при котором нет седловины между пиками выглядит, как один импульс (они не разрешимы) с неправильной высотой. Если два перекрытия происходят достаточно близко по времени, в результате амплитуда является суммой отдельных импульсов.
В цифровом формирователе откликом на импульс является прямоугольный ответ дифференциатора: отклик стремится к нулю после k импульсов. Он имеет «конечную импульсную характеристику» (FIR), это означает, что любой вход имеет нулевой эффект после конечного промежутка времени. Это основное отличие от аналогового формирователя. Чтобы ни случилось на входе DPP в результате на выходе будет ноль после некоторого периода времени. Это существенно улучшает эффективность DPP при высокой скорости счёта, уменьшает наложения и смещение базовой линии и т.д.
Восстановление плоской вершины
В аналоговом формирователе предусилитель обеспечивает быстрый подъём и плоскую вершину обрабатываемого сигнала. Дифференциатор пропускает импульс, но потом немедленно начинается затухание. Если фронт нарастает медленно, то его время формирования убывает по экспоненте и импульсы не достигают полной амплитуды, так как это показано на рисунке 7 (слева). Каждый рентгеновский детектор имеет время сбора заряда, но время формирования импульса имеет достаточно долгую продолжительность, поэтому можно игнорировать время сбора заряда. В планарном детектора, например, в 6 мм2 кремниевом детекторе Amptek электронам (дырки) требуется 0,1 (0,3) мс, чтобы пересечь 500 мм обедненной области. В зависимости от глубины проникновения рентгеновского излучения, длительность возникающего тока в предусилителе составляет от 0,1 до 0,3 мс. Если использовать форму импульса с Tflat <0,3 мс, то только часть зарядов будет измерена. Потеря высоты импульса со временем нарастания называется баллистическим дефицитом и влияет на разрешение, когда время нарастания изменяется от одного импульса к другому.
Рисунок 7. Схема дифференциатора выхода для аналогового (слева) и цифрового (справа) формирователя
 и цифрового (справа) формирователя")
В этом примере время пика 4,8 мкм сек, 500 нсек времени нарастания ведёт к 0,5 % потере высоты импульса. Проблема возникает потому, что в аналоговый «дифференциатор» не приходит актуальная производная функция и поэтому не формируется плоская вершина. Преимущество цифрового дифференциатора заключается в том, что он на самом деле реализует дифференцирование цифровых производных, поэтому получается реальная плоская вершина, как видно на рис. 7 (справа). Фронт и плоская вершина имеют такую же форму, как и предусилитель импульса. Следовательно, цифровой процессор является, защищённым от баллистического дефицита и имеет в несколько раз более короткую длительность плоской вершины.
В кремниевом дрейфовом детекторе (SDD), также есть различия во времени сбора заряда. Физический механизм отличается от планарного детектора и время нарастания зависит от деталей структуры электрода, напряжение смещается, но все SSD демонстрируют различные времена сбора заряда. Рисунок 8 показывает осциллограммы, полученные с SSD Amptek. Зеленая осциллограмма показывает предусилитель, с временем нарастания от 40 до 200 нс (в медленно растущие импульсы возникают вблизи внешнего края электрически активной области).
Рисунок 8. Осциллограммы, иллюстрирующие измерение времени нарастания импульса. Зеленая линия показывает выход предусилителя, синяя показывают вход АЦП и розовая показывает медленный канал для времени пика 100 нс и 50 нс плоской вершиной.

Спектры с эффектом баллистического дефицита показаны на рисунке 9. Эти графики были получены с использованием источника 55Fe при низком счете и без внешний коллимации. График слева соответствует Tpeak = 0,1 мс и Tflat от 0,025 до 0,2 мс. Более длительное Tflat приводит к более узкому пику. График справа соответствует Tpeak = 0,4 мс и тот же диапазон Tflat. В случае большего Tpeak, даже малое время Tflat приводит к уменьшению баллистического дефицита.
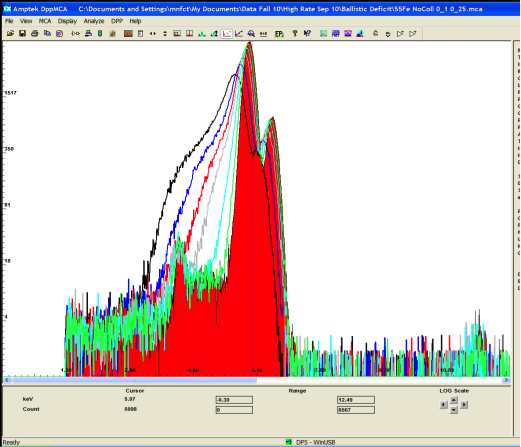
Что может сделать с баллистическим дефицитом?
-
Увеличить Tpeak и Tflat. Это позволит улучшить разрешение, но снизит максимальную скорость счета. Для Tpeak> 2 мс, Amptek рекомендует Tflat> 0,2 мс, потому что это не имеет большого влияния на пропускную способность.
-
Увеличить напряжение смещения. Это позволит в два раза сократить время нарастания;
-
Необходимо использовать внешний коллиматор. Если поток достаточно высок, то лучше использовать Amptek mini-X;
-
В принципе, можно использовать тепловое сопротивление детектора для отсечения медленных событий. Этот метод называется электронная коллимации, потому что эффективно уменьшает активную зону;
-
Используйте программное обеспечение для обработки баллистической дефицита на спектре.
Наложение
Р
исунок 10 показывает, формы выходного импульса, которые получаются от трёх разных импульсных формирователей, всё отрегулировано так, чтобы дать такую же длительность импульса, которая получается при измерении полной ширины на половине высоты. Красная кривая показывает выход самого простого формирователя, аналоговый RC-CR. Голубая показывает форму от аналогового формирователя высокого класса, квазитреугольный формирующий усилитель, использует 6 полюсов низкочастотной фильтрации (три сложные полюсные пары). Чёрная кривая от цифрового трапециевидного формирователя. Самая важная вещь, которую необходимо отметить, это то, что хотя они имеют ту же продолжительность импульса на ПШПВ, цифровой формирователь будет показывать отсутствие наложений, если два импульса разделены более чем (tpeak + tflat). Два аналоговых формирователя имеют экспоненциальные хвосты, превышающие во много раз длительность ПШПВ. Импульсы, перекрывающиеся в течение этого времени, будут накладываться друг на друга.
Рисунок 10. График, показывает импульсы, формирующиеся в трёх различных импульсных формирователях. Все имеют по существу ту же самую длительность импульса, которая задана ПШПВ

Существует два преимущества цифрового формирователя. Первое, цифровой формирователь имеет меньше наложений (даже с той же самой длительностью ПШПВ). Второе, для цифровой системы понятно время наложений: из-за симметрии импульса, не существует наложения после фиксированного времени. Аналоговые формирователи должны использовать режекцию наложений интервала намного большего, чем время пика. Снижается пропускная способности, то есть мертвое время, из-за формирования импульса, которое длиннее в аналоговой системе. Поэтому по сравнению с аналоговыми формирователями цифровая система имеет меньше наложений и высокую пропускную способность.
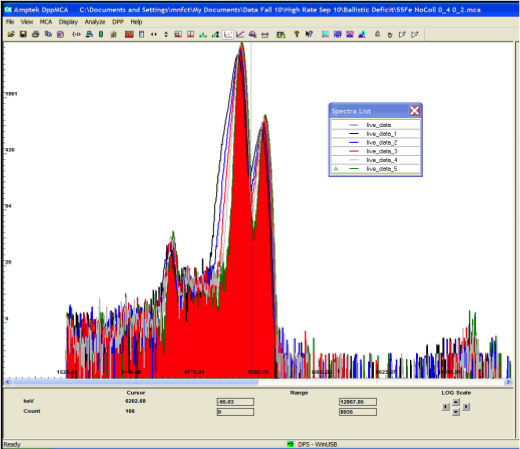
Есть несколько вопросов, связанных с режекцией наложений (PUR). Во-первых, PUR функционирует только, если Tfast <Tpeak. Во-вторых, если Tfast немного меньше, чем Tpeak, то режекцию нельзя будет провести. Например, с Tpeak = 100 нс и Tflat = 12 нс, фактическое мертвое время составляет ~ 140 нс. С Tfast = 50 нс, разрешение между парой импульсов в быстром канале ~ 100 нс. В этом случае PUR отсекает только импульсы, отстающие друг от друга от 100 до 140 нс. В-третьих, если Tflat <Tfast, «суммарный пик» на самом деле не будет являться пиком, но будет представляет собой довольно сложную форму. На графике 11 представлен этот случай.
Рисунок 11. Спектр показывает длительность плоской вершины при режекции наложений гистограммы импульсов

Значения были получены при Tpeak = 0,4 мс. Оранжевый спектр получен при отключенной режекции наложений. Заполненный серым цветом спектр показывает включенную PUR для Tflat = 0,2 мс.. Другие спектры получены более коротких значений Tflat.
Проблему баллистического дефицита лучше всего решать с помощью Tflat> 100 нс, это также помогает уменьшить скопления артефактов при режекции наложений. Amptek рекомендует использовать Tflat> 100 нс, и Tflat> 200 нс для Tpeak> 2 мс или около того, чтобы помочь уменьшить эти эффекты. Синий спектр для Tflat = 75 нс. Когда длительность плоской вершины короче интервала режекции наложений, то импульсы могут накладываться дуг на друга, но они не дают суммарный пик. Зеленый и красный спектр для Tflat = 25 и 50 нс.
Программное обеспечение для анализа спектра, как правило, предназначено для корректного удаления наложившихся пиков. Чтобы получить хороший суммарный пик, нужно продлить плоскую вершину, что, конечно, снижает пропускную способность.
Проблему баллистического дефицита лучше всего решать с помощью Tflat> 100 нс, это также помогает уменьшить скопления артефактов при режекции наложений. Amptek рекомендует использовать Tflat> 100 нс, и Tflat> 200 нс для Tpeak> 2 мс или около того, чтобы помочь уменьшить эти эффекты. Синий спектр для Tflat = 75 нс. Когда длительность плоской вершины короче интервала режекции наложений, то импульсы могут накладываться дуг на друга, но они не дают суммарный пик. Зеленый и красный спектр для Tflat = 25 и 50 нс.
Программное обеспечение для анализа спектра, как правило, предназначено для корректного удаления наложившихся пиков. Чтобы получить хороший суммарный пик, нужно продлить плоскую вершину, что, конечно, снижает пропускную способность.
На осциллограмме (рис. 12), форма импульса равна сумме двух трапеций, смещенных во времени. Если два события разделены более чем на продолжительность плоской вершины, то амплитуда пика линейно зависит от задержки между событиями. Если задержка меньше длительности плоской вершины, то на графике получается сумма пиковых значений.
Рисунок 12. Осциллограммы демонстрирую наложения импульсов. Розовый график - вход АЦП. Светло-голубой график сформированный выход (пиковое время 2,4 мс). Синее график "ICR" - логический сигнал, указывающий, что импульс был обнаружен в быстром канале
. Синее график")
Соотношение сигнал-шум
Основная задача спектрометрического усилителя состоит в линейной передаче амплитудных значений сигналов, поступающих от детекторов излучений. При этом допускается изменение формы сигналов. Это означает, что фильтрующие цепи усилителя можно сделать такими, чтобы через них проходил основной спектр сигналов, а спектр шумов максимально ограничивался. В этом случае получим оптимальное соотношение сигнала к шуму. Сигнал на выходе оптимального фильтра имеет форму двух пересекающихся кривых. Такой фильтр обеспечивает наилучшее отношение сигнал к шуму.
Реальные фильтры, как правило имеют другие характеристики, и отношение сигнал к шуму у них хуже. Сравнивать фильтры удобно с помощью коэффициента превышения шума Кп.ш=ƞ∞/ ƞ, показывающего во сколько раз ƞ∞ оптимального фильтра превышает ƞ данной системы. Основные показатели разных типов импульсов, приведены в таблице 1. Здесь Кп.ш. вычислены при условии, что интенсивность последовательного и параллельного шумов одинакова, а амплитуда выходного сигнала нормализована к единице.
Реальные фильтры, как правило имеют другие характеристики, и отношение сигнал к шуму у них хуже. Сравнивать фильтры удобно с помощью коэффициента превышения шума Кп.ш=ƞ∞/ ƞ, показывающего во сколько раз ƞ∞ оптимального фильтра превышает ƞ данной системы. Основные показатели разных типов импульсов, приведены в таблице 1. Здесь Кп.ш. вычислены при условии, что интенсивность последовательного и параллельного шумов одинакова, а амплитуда выходного сигнала нормализована к единице.
Таблица 1. Коэффициенты превышения шума и форма импульсов некоторых формирующих цепей

Исследователи давно сделали вывод, что для фиксированной продолжительности импульса, когда последовательный шум является доминирующими, оптимальное соотношения сигнал-шум обеспечивает импульс в виде правильного треугольника, и в виде “шипа”, когда доминирующим является параллельный шум.
Последовательным шумом называется электронный шум, возникающий из-за компонентов использующихся вместе с детектором. Как правило, шуму соответствует напряжения в предусилителе и возникает в первую очередь из-за шума во входном канале предусилителя. Параллельный шум это электронный шум, возникающий из компонентов подключенных параллельно с детектором. Как правило, возникает в основном из теплового шума в детекторе и параллельных сопротивлениях.
Последовательным шумом называется электронный шум, возникающий из-за компонентов использующихся вместе с детектором. Как правило, шуму соответствует напряжения в предусилителе и возникает в первую очередь из-за шума во входном канале предусилителя. Параллельный шум это электронный шум, возникающий из компонентов подключенных параллельно с детектором. Как правило, возникает в основном из теплового шума в детекторе и параллельных сопротивлениях.
Аналоговые формирователи приближаются к треугольнику, но цифровой процессор имеет передаточную функцию намного ближе к этому идеалу. Эквивалент шумового уровня для системы обнаружения радиации характеризуется шумовыми индексами для последовательного и параллельного шумовых генераторов, As и Ap для заданного пикового времени tpeak. Шум может быть записан:

где Lleak – это ток утечки через детектор, Rp – это параллельное сопротивлением с детектором, Cin – это общая входная ёмкость, gm – это проводимость полевого транзистора и epeak – это 1/f шума. Ключевой точкой являются индексы шумов Ap и As зависящие от деталей усилителя формирователя.
Таблица ниже показывает индексы шума и длительность импульса ПШПВ для трех широко распространенных усилителей-формирователей, аналогичных тем, которые показаны на рисунке 9. Если имеет место постоянное время пика, трапецеидальный и гауссовый имеют одинаковый индекс параллельного шума, но цифровой имеет более низкий индекс последовательного шума, а гауссовый имеет большую продолжительность, ведущую к увеличению количества наложений. Нужно быть осторожным в этом сравнении, поскольку время пика на самом деле не ключевой параметр. На рисунке 9, все импульсы имеют одинаковое время пика, но различную длительность. Чем дольше будет продолжительность импульсов, тем больше будет проявляться наложение, даже с тем же самым временем пика.
Так же возникает проблема нахождения оптимального фильтра, позволяющего на конечном временном отрезке перед появлением спектрометрического импульса с минимальной шумовой погрешностью вычислить величину смещения базовой линии, запомнить ее и вычесть из суперпозиции сигнала, шума и смещения по постоянному току. Ключевая точка — это то, что цифровой импульсный процессор с его правильной трапецией имеет низкие шумовые индексы и уже ширину во временной области, чем сравниваемые аналоговые формирователи. Поэтому это одновременно уменьшает электронный шум и наложения.
Так же возникает проблема нахождения оптимального фильтра, позволяющего на конечном временном отрезке перед появлением спектрометрического импульса с минимальной шумовой погрешностью вычислить величину смещения базовой линии, запомнить ее и вычесть из суперпозиции сигнала, шума и смещения по постоянному току. Ключевая точка — это то, что цифровой импульсный процессор с его правильной трапецией имеет низкие шумовые индексы и уже ширину во временной области, чем сравниваемые аналоговые формирователи. Поэтому это одновременно уменьшает электронный шум и наложения.
Таблица 2. Шумовые индексы и длительность импульса (FWHM) для трех обычных усилителей формирователей
 для трех обычных усилителей формирователей")
Многоканальный амплитудный анализатор импульсов (MCA). Пропускная способность
Существует два источника мертвого времени в аналоговой системе: некоторые импульсы могут быть потеряны (не детектируются) потому, что (а) импульсы перекрываются во времени, или (b) пик детектируется, но цифровой преобразователь занят. Большинство многоканальных амплитудных анализаторов используют АЦП, которым достаточно микросекунд но даже если аналоговые импульсы не перекрываются во времени, счет будет потерян из-за мертвого времени цифрового преобразователя. В цифровом процессоре нет мертвого времени связанного с оцифровкой пика. Вся форма импульса уже оцифрована на высокой скорости, например, 20 MHz. Будет несколько тактов, необходимых для обновления памяти гистограммы, но это ничтожно мало. Поэтому цифровая система не имеет мертвого времени, связанного с оцифровкой пика. У нее есть мертвое время, связанное с длительностью импульса, как обсуждалось выше.
Линейность
В аналоговой системе, нелинейность АЦП имеет большое влияние на нелинейность системы. Так как многоканальный амплитудный анализатор импульсов производит однократное измерение высоты пика, любая нелинейность в размере шагов АЦП, приведет к нелинейным измерениям высоты импульса. Одним из распространённых подходов АЦП для сглаживания нелинейности, является добавление случайных чисел в импульс, оцифровка, а затем вычитание случайных чисел. Результатом является несколько кодов АЦП, которые используются для измерения напряжения высоты одиночного импульса. В цифровой системе, каждая амплитуда импульса является суммой множества различных измерений АЦП, по сути, используется множество различных кодов АЦП. Это дает цифровая система значительно улучшенную линейность.
Конфигурируемость.
В аналоговом импульсном процессоре, большинство параметров определяется резисторами и конденсаторами. В псевдо-Гауссовом формирователе, например, время формирования определяется набором из четырнадцати резисторов и конденсаторов. Аналоговый усилитель формирователь с четырьмя временными константами формирования потребует четыре различных набора всех этих компонентов. Это непрактично - иметь много различных параметров конфигурации в аналоговой системе.
В цифровой системе, время формирования устанавливается на количество тактов цифровой задержки и в аккумуляторе. Можно легко переключаться между формирователем времени и часами в 20 МГ, размер шага 50 нс, даёт очень тонкую регулировку. Такие опции обработки невозможны в аналоговой схеме. Например, некоторые цифровые процессоры настраивают пиковое время по принципу “импульс за импульсом”: если интервал между двумя импульсами маленький, то тогда используется короткое пиковое время, добавляя немного шума, но исключая наложения и потерю счета. В цифровой системе, можно легко получить намного больше параметров и опций конфигурации. Эти параметры включают не только время формирования, но и параметры восстановления базовой линии, параметры режекции наложений и т.д. Цифровая система имеет гораздо больше параметров конфигурации, поэтому пользователь может легко адаптировать систему к потребностям решаемой задачи, повышая эффективность работы.
Стабильность и надёжность.
Поскольку аналоговая система основана на резисторах и конденсаторах, ее стабильность ограничивается стабильностью этих компонентов и воспроизводимостью их погрешностей. Температурный коэффициент резисторов и конденсаторов вызывает рост и формирование градиента температуры. Погрешности среди резисторов и конденсаторов служат причиной различия между номинально одинаковыми формами импульса при переходе от одной конфигурации к другой. Точность усиления обычно устанавливается с помощью потенциометра и трудно вернуться к предыдущей настройке, также трудно точно настроиться две системы, чтобы они соответствовали друг другу.
В цифровой системе стабильность и воспроизводимость зависит от нескольких очень точных источников, например, кварцевый генератор для установки времени. В этом случае. Температурный дрейф намного ниже. Воспроизводимость намного лучше. В цифровой системе, где коэффициент усиления задаётся в цифровом виде, можно в точности вернуться к предыдущим параметрам. Кроме того, частота отказов в ПЛИС является очень низкой в сравнении с отказами многих дискретных компонентов, с их паяными соединениями.
Заключение
Цифровой процессор имеет внутренние эксплуатационные преимущества по сравнению с аналоговым формирователем. У него есть конечная импульсная характеристика, снижены наложения и смещение базовой линии, он обеспечивает лучшую фильтрацию шума (для той же ширины импульса), он уменьшает баллистический дефицит и улучшает линейность, он имеет лучшую конфигурируемость, стабильность и надёжность.
Его основной недостаток заключается в том, что быстрый АЦП потребляет значительно больше энергии, чем операционный усилитель и медленный АЦП используемый в аналоговом формирователе. Когда требуется лучшая производительность, самый низкий уровень шума и операции на самых высоких скоростях счёта, цифровой процессор является самым лучшим решением.
